| visual | word | ton | home | links | open museum skryl |
| IV. KOORDINATENSYSTEM UND GLEICHGEWICHTSPUNKTE |
|
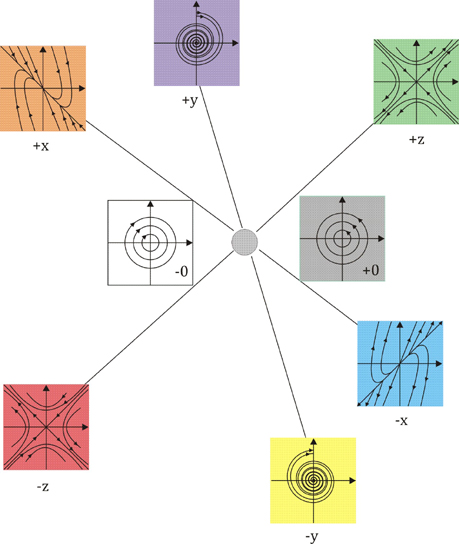
Ein Gleichgewichtspunkt eines Vektorfeldes ist ein Punkt, an dem das Vektorfeld Null ist. Der Gleichgewichtspunkt des Vektorfeldes ist die Gleichgewichtsposition des dynamischen Systems. Henri Poincaré gab eine Beschreibung und Klassifizierung von Gleichgewichtspunkten: Sattel, Fokus, Knoten und Zentrum. Ein Gleichgewichtspunkt ist hyperbolisch, wenn keiner der Eigenwerte einen Realteil null hat. Wenn alle Eigenwerte einen negativen Realteil haben, ist das Gleichgewicht eine stabile Gleichung. Wenn mindestens einer einen positiven Realteil hat, ist das Gleichgewicht ein unstabiler Knoten. Wenn mindestens ein Eigenwert einen negativen Realteil hat und mindestens einer einen positiven Realteil hat, ist das Gleichgewicht ein Sattelpunkt. Wir schlagen vor, ein Koordinatensystem mit Gleichgewichtspunkten zu identifizieren, wobei jede Koordinate (±0; -y; -z; -x; +y; + z; +x) einem bestimmten singulären Punkt entspricht: «-0» Zentrum. Kreis. Negative imaginäre Werte. «+0» Zentrum. Kreis. Positive imaginre Werte. «-y» Instabiler Fokus. Logarithmische Spiralen. Komplexe Werte mit positivem Realteil. «+y» Stabiler Fokus. Logarithmische Spiralen. Komplexe Werte mit negativem Realteil. «-x» Instabile Knoten. Parabeln. Reelle positive Werte. «+x» Stabile Knoten. Parabel. Reelle negative Werte. «-z» Instabiler Sattel. Hyperbole. Reelle Werte verschiedener Zeichen. «+z» Stabiler Sattel. Hyperbole. Reelle Werte verschiedener Zeichen (Abb.12). Acht Gleichgewichtspunkte ergeben 64 mögliche Kombinationen (8 x 8). Diese Kombinationen kann man als eine Matrix dargestellt werden.(s.Abb.10a,10b u.10c)
|